5amis 5tar
January 2023 – April 2023
Skills and Equipment: VHDL, Assembly, UART, SPI, Concurrent Programming, Logic Analyzers, Bare-Metal Programming, FPGA development board
- Goal: Implement a RISC-V architecture on an FPGA development board, specifically the RV32I instruction base.
- Utilized an Altera Cyclone II FPGA to implement a rudimentary pipelined RISC-V CPU
- Designed and wrote VHDL modules for the data path – memory, ALU, registers, etc – and control unit
- Implemented 75% (30 instructions) of the RV32I instruction base

Kermitron
September 2022 – April 2023
Skills and Equipment: C/C++, Bash, UART, USB, Linux, Logic Analyzers, Robotics, Control Systems, Raspberry Pi, Arduino
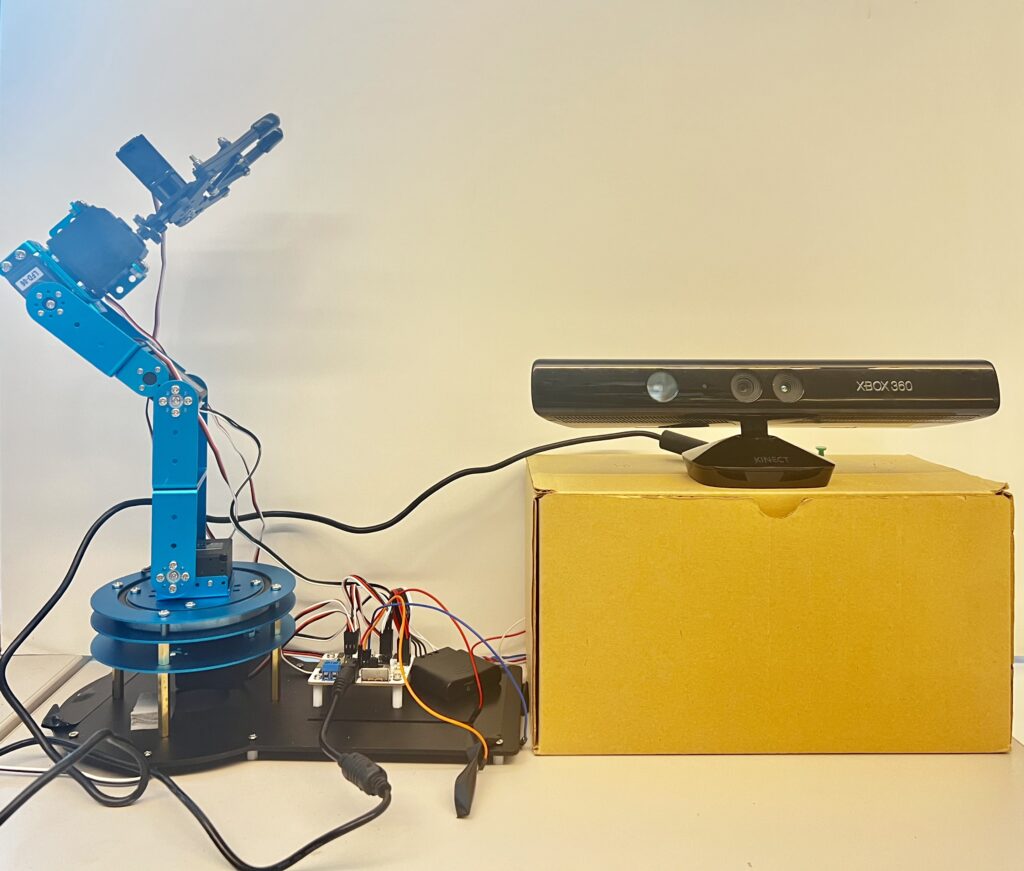
- Goal: Create a robotic arm capable of mimicking human movement as a disability aid for individuals with reduced mobility or strength or as a tool to optimize repetitive motions
- Communicated with servo motors via UART and interfaced with a Kinect 360 using C/C++ to track movement
- Simulated arm movement and Kinect data using Matlab and Python for testing purposes
- Utilized a Raspberry Pi and Arduino Uno to process Kinect and servo data.
D.A.R.T: Dubatron Autonomous Remote Tank
January 2022 – July 2022
Skills and Equipment: C/C++, UART, USB, Zigbee, Linux, Logic Analyzers, Board Bringup, Oscilloscopes, OpenSCAD, Control Systems, Bare-Metal Programming
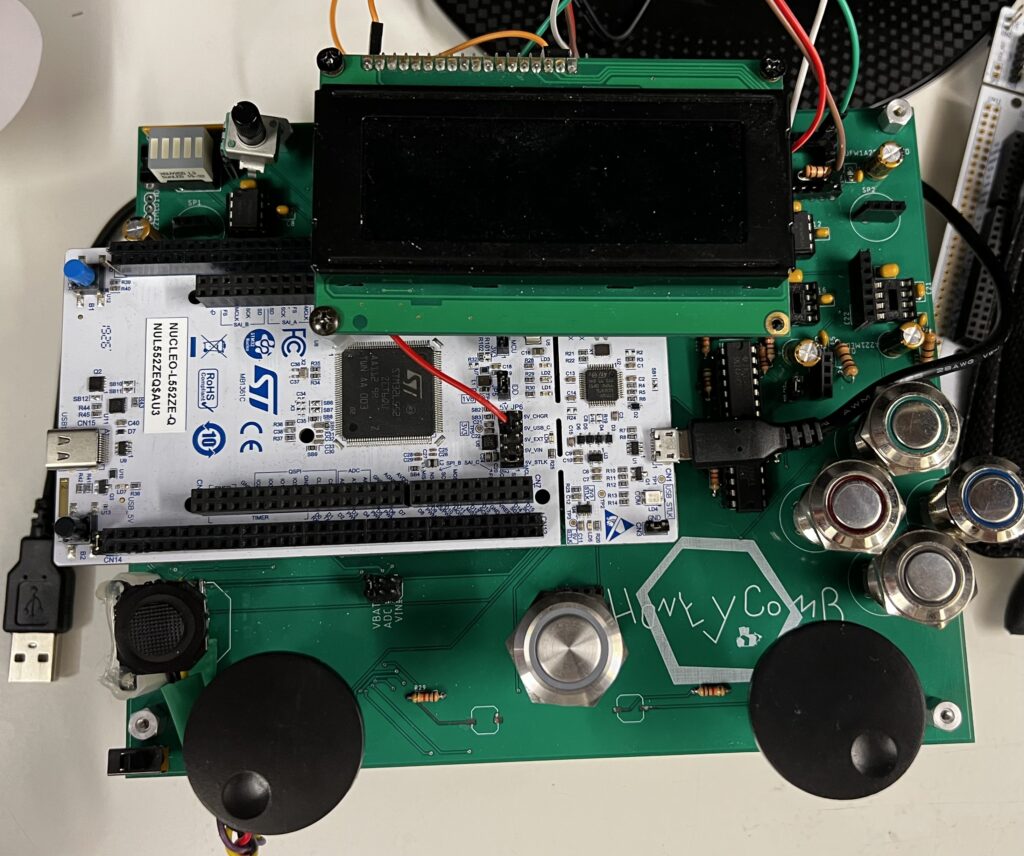
- Goal: Modify the previous year’s custom controller to work with a modified Dubatron to control it wirelessly with a gyroscope. The tank will override user control to avoid collisions by using infrared and ultrasonic sensors.
- Changed the onboard controller to an STM32 Nucleo board
- Developed and wrote C/C++ code to interface with infrared sensors using ADC and ultrasonic sensors over GPIO for distance gauging
- Used PWM to interface with the motors and PWM speaker
- Redesigned and brought up a new tank circuit board using Autodesk EAGLE
- Modeled a new front plate for the sensors using OpenSCAD

Qamar
August 2021 – December 2021
Skills and Equipment: FPGA, System Verilog, USB, Linux, Logic Analyzers, Oscilloscopes, Assembly, Bare-Metal Programming
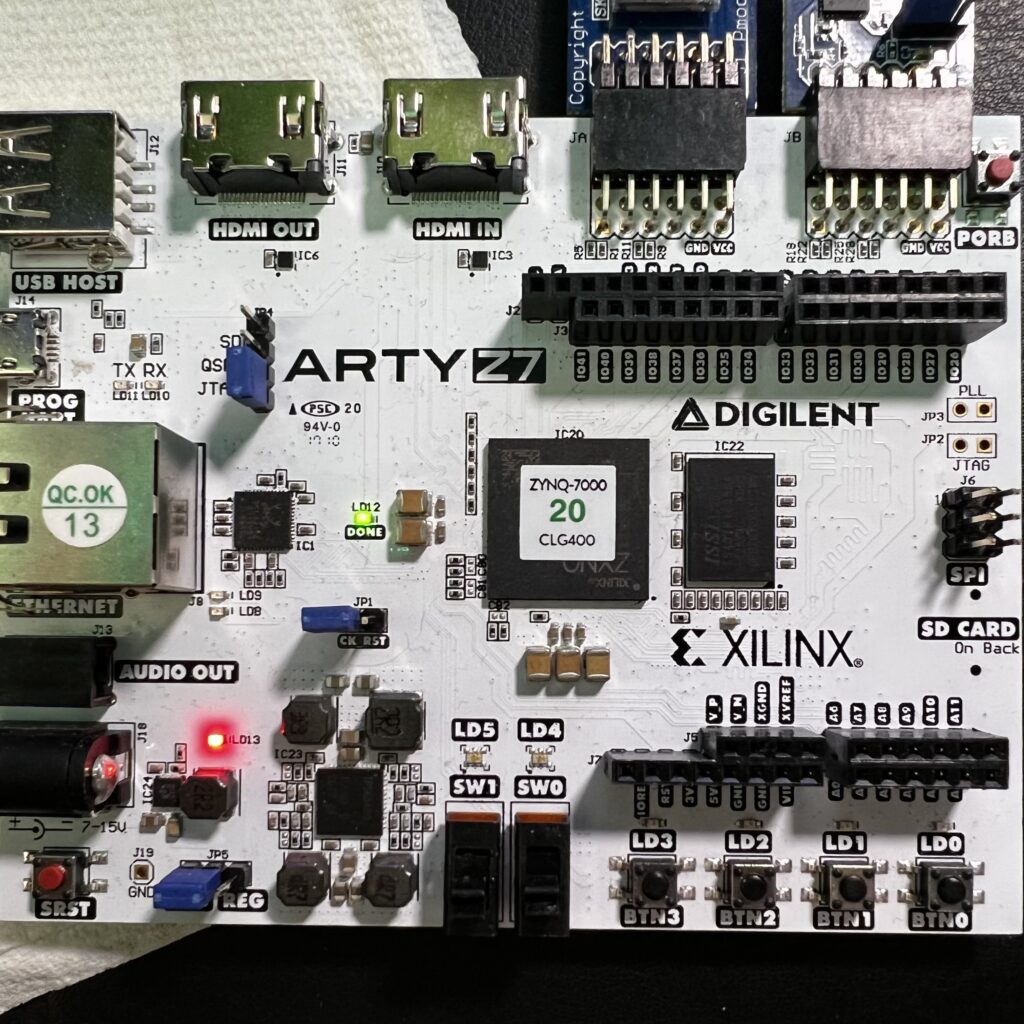
- Goal: Create a remote desktop solution using an external device rather than rely on the client/host’s processing power
- Utilized a Zynq-7000 FPGA to implement a hardware solution for remote desktop
- Imported and implemented HDL design blocks for HDMI, Ethernet, and USB interfacing
- Interfaced with Digilent’s Pmod add-on devices for USB and character display implementation
Busy Bee Controller
August 2020 – May 2021
Skills and Equipment: C/C++, SPI, UART, I²C, Bare-Metal Programming, Board Bringup, PCB Mill, ADC, DAC, Gyroscope
- Team Members: 14
- Total Computer Engineers: 2
- Goal: Create a new and unique experience in a 2D-platformer game
- Develop custom hardware for the game, titled “Vesna”.
- Collaboration with another engineer to create a new and unique device
specifically for the game – though its functionality extends beyond the game - Soldered the printed circuit board and designed the CAD model for the chassis
Dubatron-69
August 2019 – December 2019
Skills and Equipment: ARM Assembly, Circuit Testing Equipment, IR blasters, ADC, PWM,
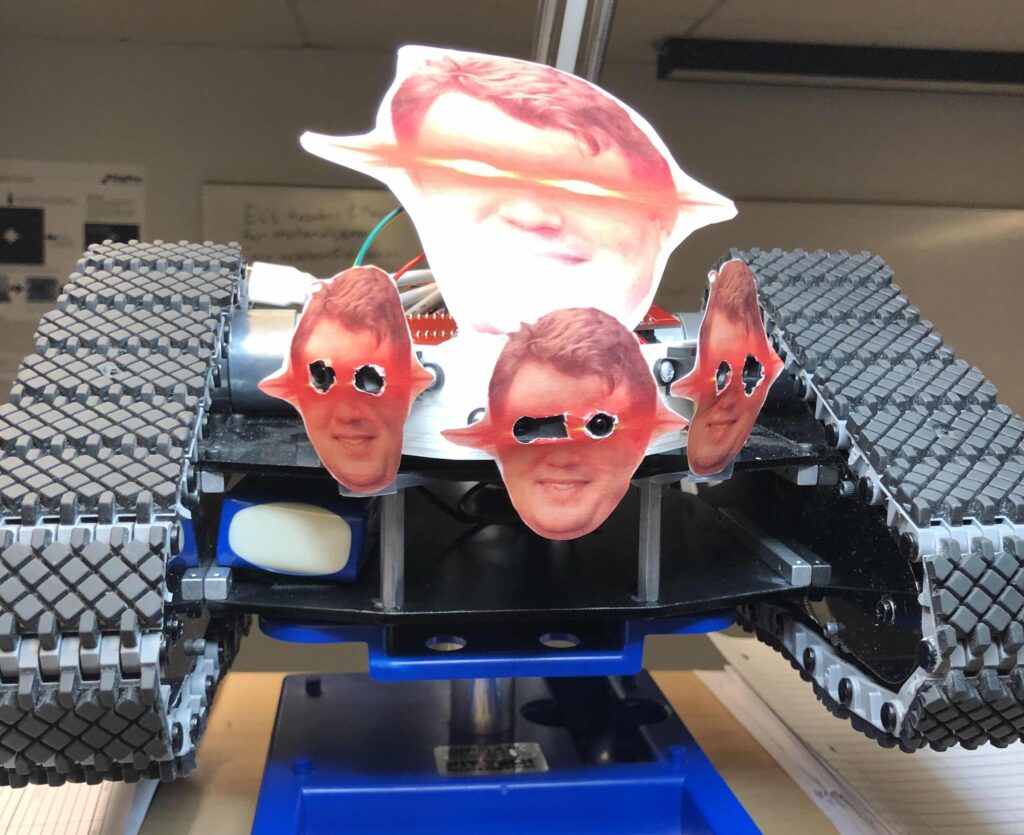
- Goal: Program in ARM Assembly to allow a ‘tank’ to traverse a maze course free from direct human control
- Developed and wrote ARM Assembly code to interface with infrared sensors using ADC for distance gauging
- Used PWM to interface with the motors
- Added PWM buzzers for increased dramatic flair
- Personalized the tank using a front plate for the sensors